
|
|
Update Subroutine |
|
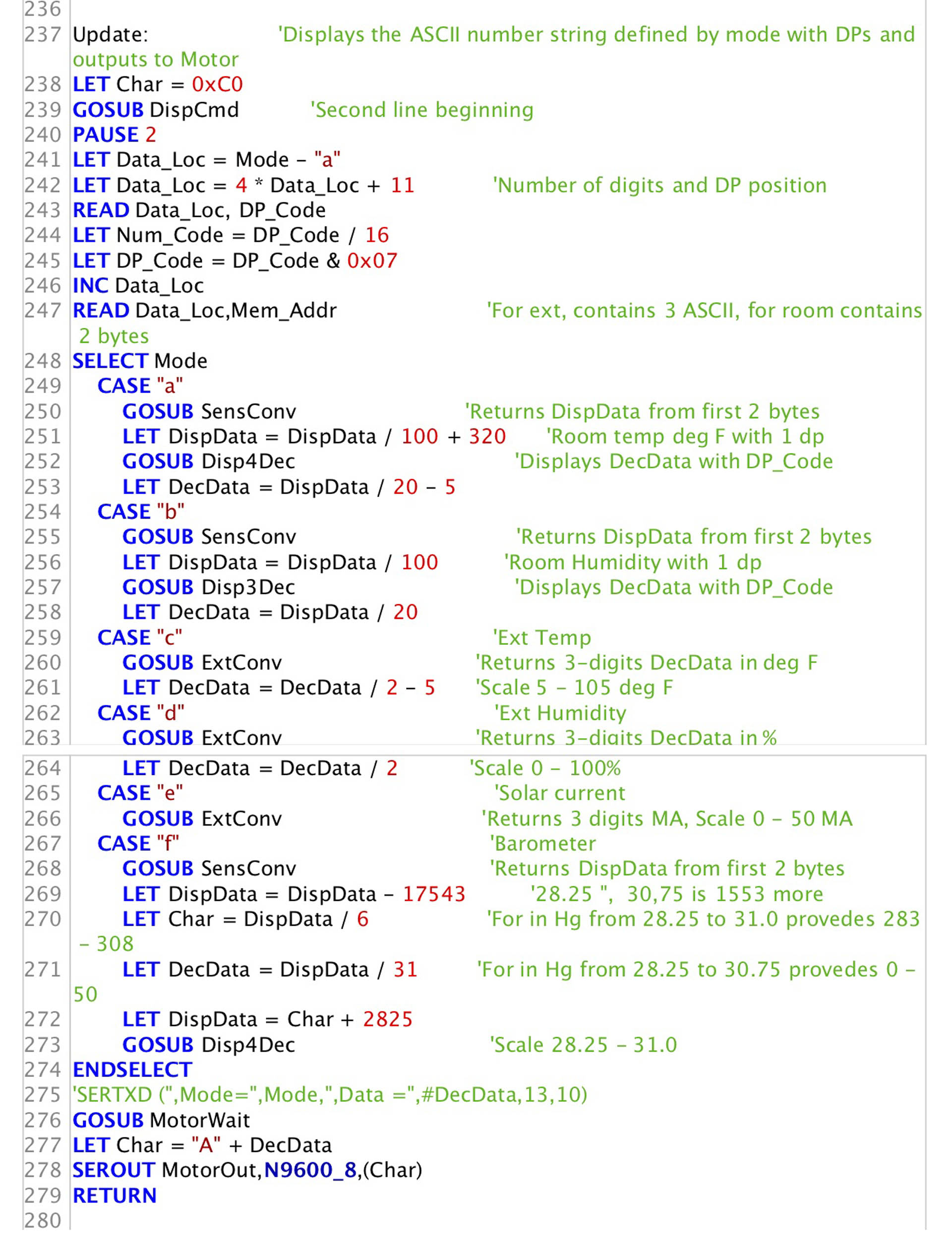
This periodically updates the numerical measurement at the beginning of the second line. All scaling calculations are in this code section. It also sends a command to the dial, which may not necessarily be proportional to the displayed number. It gets its input by reading the table in EEPROM which is indexed by Mode. The data is retrieved from memory, but internal and external are treated different. The internal measurements are 2 binary bytes, which must be combined into a word using SensConv. This needs to be processed differently for each Mode because of scaling.. The external measurements are already in ASCII and are displayed by calling ExtConv. but Update gets a binary byte which may be custon processed for the dial command. The dial output is converted to ASCII and transmitted to the Motor Picaxe when it is ready. |
 |